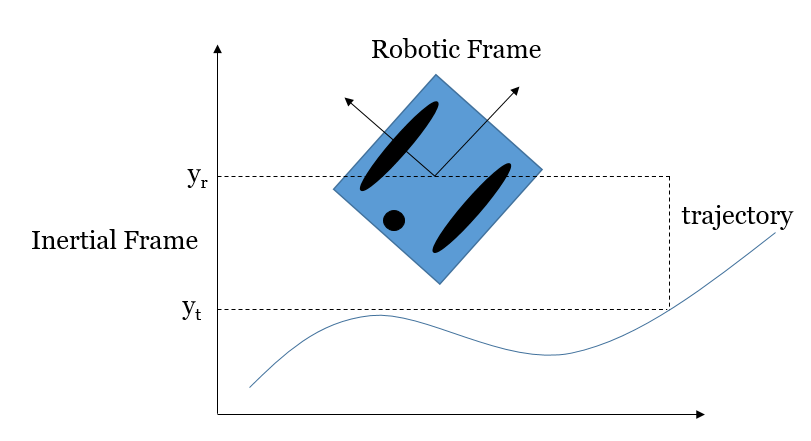
Trajectory tracking of differential drive mobile robot
Spring ’22, ASU
Objective: Control a mobile robot to navigate a known environment with obstacle. Simulation: Used RRT to generate trajectory for dynamic tracking, compared PD, PID and sliding mode controllers. Results: PID controller was found to be better than PD and SMC controller when comparing RMS values
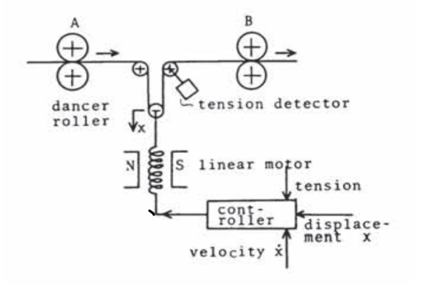
Objective: Control tension in an active dancer roller used in wire-rod mills. Simulation: Simulated entire control strategy for the MIMO system using MATLAB, using both state feedback and LQR controllers. Results: Got the desired output characteristics with respect to the settling time (<3.8 s), and overshoot (<20%).
Objective: Modeling of a robot that could transfer drinks from one station to another. Simulation:Kinematic and work-space modelling of the PnP robot was done based on the IRB-1200 robot.
Results:Made an interactive GUI, where forward and inverse kinematic model were calculated and visualized.